Aerial Robot - Ground Robot Coordination for Spatial Mapping and Analysis
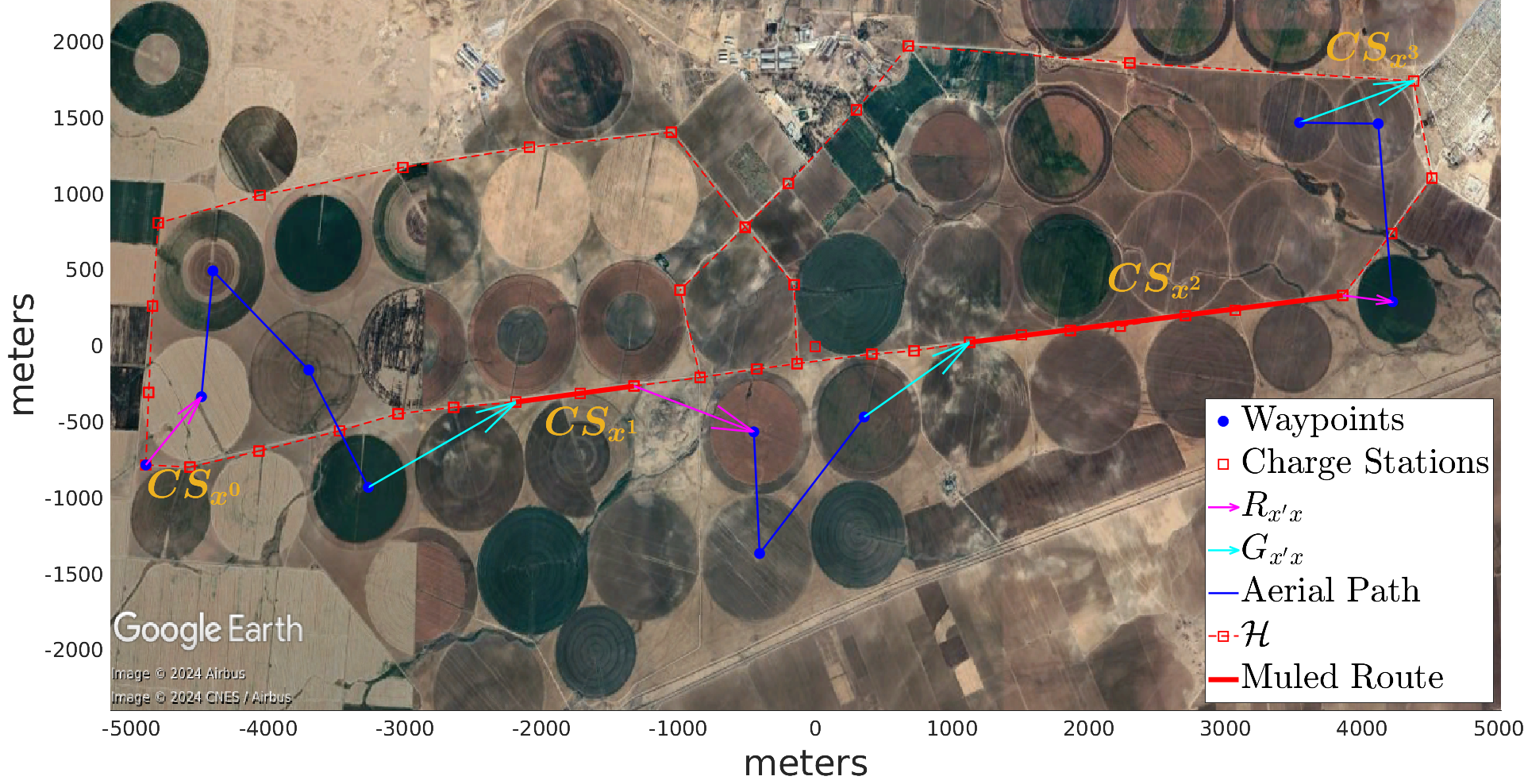
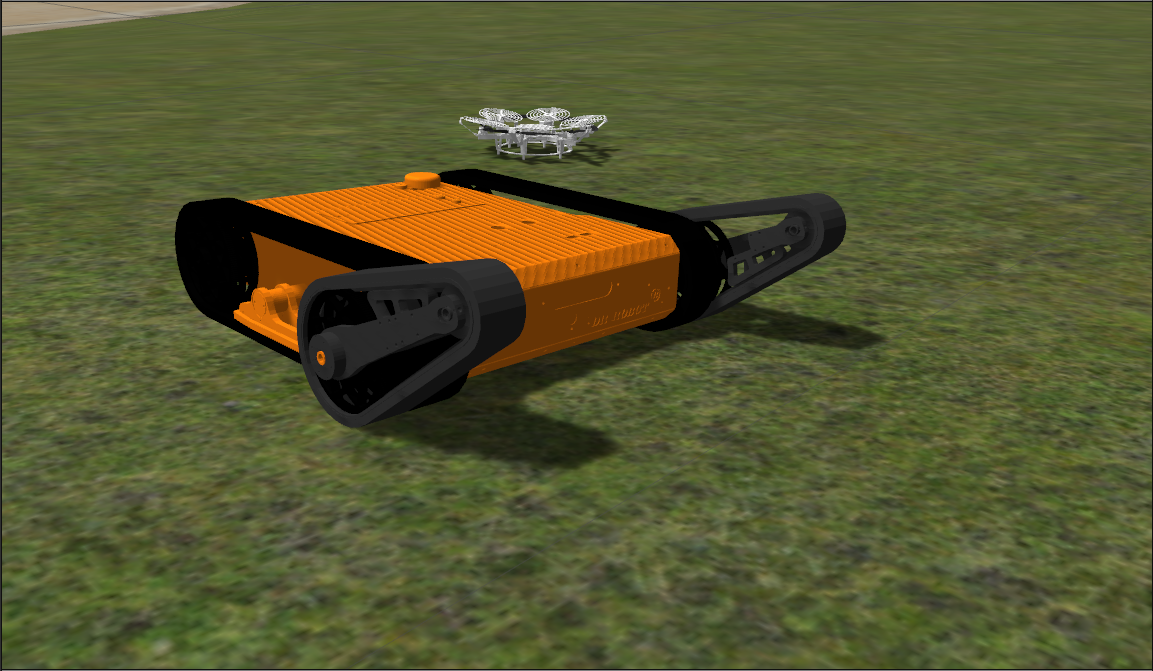
Aerial robots (AR) can be used for surveys, logistics, inspection, etc. However, with current battery technologies, they have very limited operation times. To overcome this issue, a mobile ground robot (MGR) can used in coordination with the AR to replace its battery, while the AR can help navigation of the MGR by providing aerial maps of the area. This project can be divided into 4 main categories:
- Development of planning algorithms for coordinated navigation of the robots
- Design and manufacturing of mobile autonomous battery replacement systems
- Autonomous aerial & ground robot navigation in the field
- Real-time area mapping and analysis with aerial imaging